Jiawen Wang (王家文)
Email: chiawenw [AT] ucla [DOT] edu
Keep curiosity alive.
Research Areas: Embodied AI, Motion Control and Perception, Human-Robot Interaction
I am now a Ph.D. student at the Mechanical and Aerospace Engineering Department, UCLA, under the supervision of Prof. M. Khalid Jawed. My research interests include motion control, robot learning, and embodied AI.
Ph.D. Student, University of California, Los Angeles (UCLA), USA (2025 – Present)
M.S. in Science, Peking University, China (2022 – 2025)
B.S. in Automation, North China Electric Power University, China (2018 – 2022)
News
| May, 2025 | I’m honored to have been named a Peking University Outstanding Graduate. Onward and upward! |
|---|---|
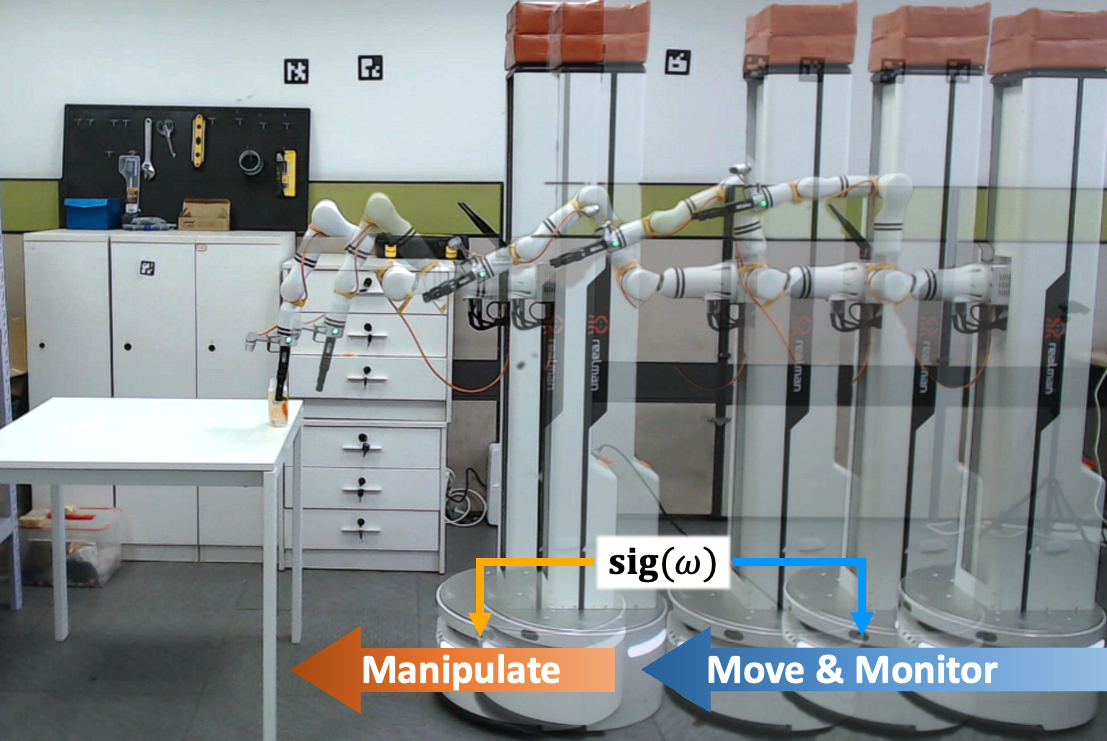
| Jan, 2025 | Our works, EHC-MM: Embodied Holistic Control for Mobile Manipulation and Domain Adaptation-Based Crossmodal Knowledge Distillation for 3D Semantic Segmentation, have been accepted to ICRA 2025. |
| Oct, 2024 | I attended the 2024 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS 2024) in Abu Dahbi, UAE. That’s really a great experience in Robotics! |
| Dec, 2023 | I presented our paper A Novel Learning-based Approach for Dual-Arm Robot Operation Point Selection in ICDL 2023 in Macau, China. |
| Oct, 2023 | Our work on Robot Arm Reaching Based on Inner Rehearsal got published by Biomimetics. |
| Aug, 2023 | I presented our paper Optimizing Robot Arm Reaching Ability with Different Joints Functionality in RO-MAN 2023 in Busan, Korea. |
Selected Publications
2025
2023
- RO-MANOptimizing Robot Arm Reaching Ability with Different Joints FunctionalityIEEE International Conference on Robot and Human Interactive Communication (RO-MAN), 2023
- ICDLA Novel Learning-based Approach for Dual-Arm Robot Operation Point SelectionIEEE International Conference on Development and Learning (ICDL), 2023
